本报讯 (记者刘晓一)5月29日,深圳市越疆科技股份有限公司(以下简称“越疆”)正式发布自研世界动作模型空弈DobotWAM具身大模型。
据悉,该模型在权威具身智能标准评测基准LIBERO中,顺利完成LIBERO-Spatial、LIBERO-Object、LIBERO-Goal、LIBERO-10四大标准任务套件,覆盖空间关系理解、物体泛化、目标指令理解、长时序任务执行等核心能力,平均成功率达99.25%,综合表现领先π0.5、π0、GR00T-N1.5等多款主流公开模型及行业同类已公示模型,评测结果排名第一。
这一成绩不仅源于越疆在协作机器人领域的技术积淀,更标志着其具身智能技术已跻身行业头部。同时,也意味着越疆正引领具身智能行业从跳舞表演等展示型动作,向真实场景下的现场操作能力迈进。
当前机器人落地的核心挑战,已从基础的物体识别,转变为在动态开放场景中,精准理解空间关系、拆解任务目标、生成合规动作,并保障长时序任务的全局执行一致性。现阶段主流的视觉—语言—动作模型,虽在规整场景中效率突出,但过度依赖二维图像与离线轨迹模仿,面对空间扰动、物体变化及长流程任务时,易出现动作漂移、目标丢失、整体任务失败等问题,行业亟需能够深度理解动作逻辑的新型模型。
空弈DobotWAM的优异表现,得益于感知、理解、控制、数据闭环的全方位系统性设计。模型在传统视觉-语言-动作建模基础上,融入三维空间理解、机器人运动几何约束与真实数据闭环机制,让机器人摆脱单一的动作模仿,真正理解动作的底层逻辑与执行原理。
空弈DobotWAM的核心技术突破涵盖四大维度。一是3D空间表征技术,摒弃单一二维像素特征,精准感知三维空间几何结构,大幅提升场景泛化能力;二是关节动态几何约束算法,优化动作轨迹稳定性,有效解决长时序任务中的姿态偏差、抓取失败等问题;三是高级语义任务拆解能力,精准解析复杂语言指令,拆分细化子步骤,规避局部正确、全局失误的问题;四是真机数据飞轮闭环,依托真实实验持续采集、训练、迭代,大幅提升模型从仿真场景到真实环境的迁移能力。四项技术协同耦合,为具身智能规模化落地搭建了成熟的系统性框架。
在插充电器、插笔帽两项高精度接触作业测试中,空弈DobotWAM大模型表现亮眼。面对需要精准空间匹配、动态误差修正的精细操作,该大模型可自主完成目标定位、轴线对齐、精准插入与姿态稳定控制,全程流程顺畅、执行稳定,充分验证了其在真实物理场景中完整的作业闭环能力。
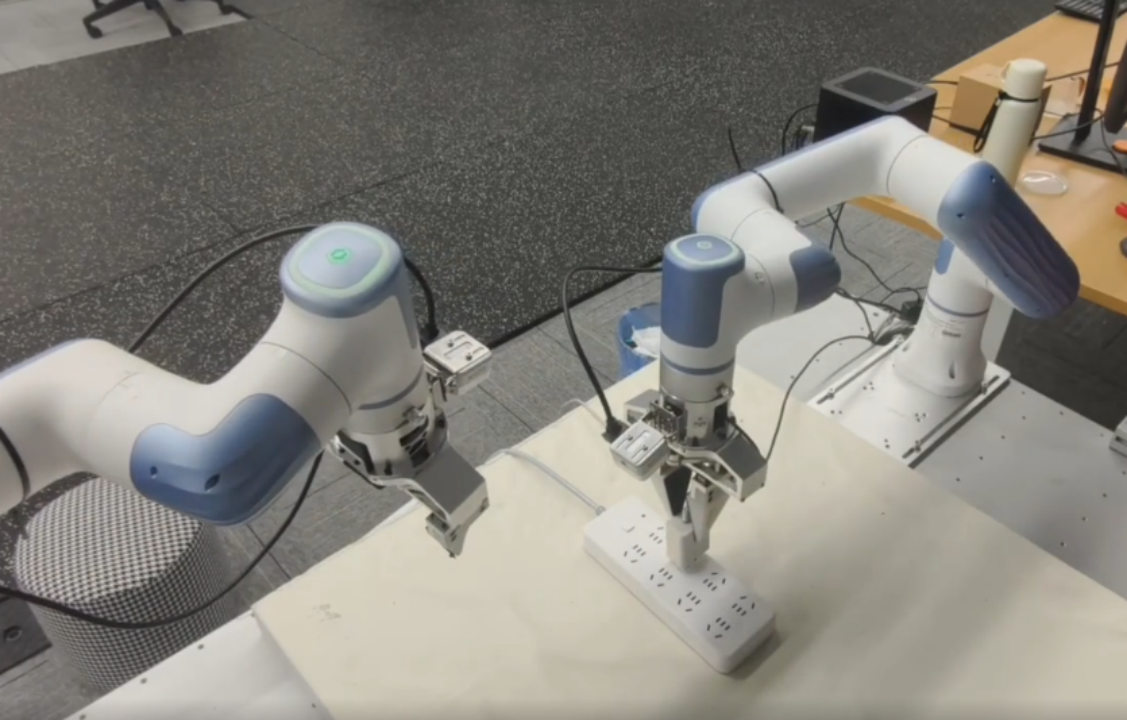
(插充电器作业测试 越疆供图)
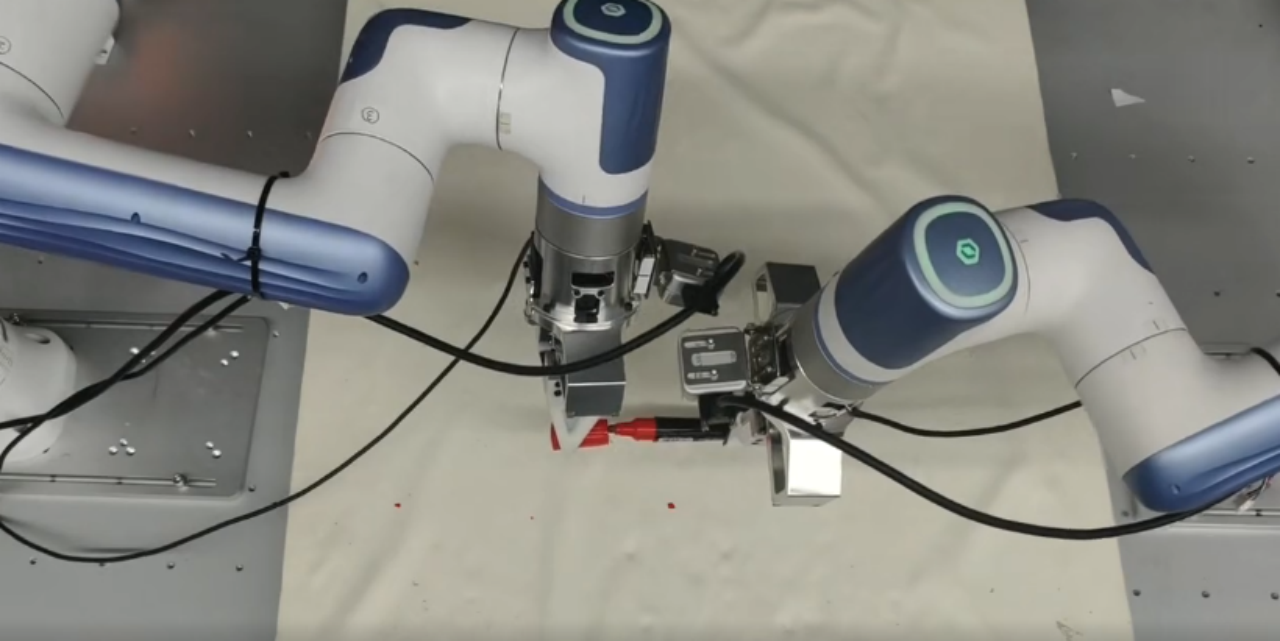
(插笔帽作业测试 越疆供图)
具身智能的规模化落地,不能只依赖超大参数与单次亮眼表现,而要靠一套同时具备空间理解、任务规划、精准执行和持续进化能力的模型系统。未来,越疆将持续迭代空弈DobotWAM模型,推动机器人从“能看懂、能行动”,升级为“能适应、能泛化、能长期可靠执行”,持续赋能真实场景智能化落地。
(编辑 李家琪)
 京公网安备 11010602201377号京ICP备19002521号
京公网安备 11010602201377号京ICP备19002521号















